
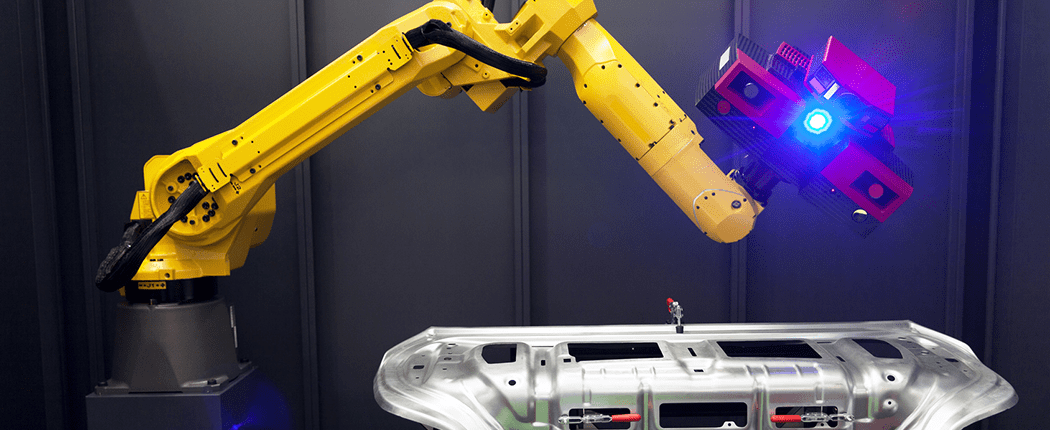
درباره تکنولوژی بینایی سه بعدی که کسب و کارها برای کاربردهای رباتهای صنعتی از آن بهره میبرند، بیشتر بدانید.
از آنجا که صنایع بیشتری در کارهای خود به رباتها نیاز پیدا کردهاند، شمار رباتهای صنعتی نصبشده در سراسر دنیا در پنج سال آینده، رشد مثبتی تجربه خواهد کرد. با این میزان علاقه روزافزون به اتوماتیکسازی، سرمایههای بیشتری به تحقیق و توسعه اختصاص داده میشود. نتیجه آن، سیستمهای رباتیک کوچکتر با عناصر پیشرفتهتر است. روز به روز بیشتر گرایشها به سلولهای رباتیک در بینایی سه بُعدی اتوماتیک بیشتر میشود. این تکنولوژی به ربات امکان میدهد موقعیت، اندازه، عمق و رنگ یک چیز را شناسایی کند. بخشهایی مانند لجستیک، فرآوری غذا، علوم زیستی و تولید، روشهایی برای خودکار ساختن فرآیندهای خود با استفاده از عناصر بینایی ماشین، پیدا میکنند.
رویکردهای گوناگون بینایی سه بُعدی
تکنولوژی بینایی، یک ابزاری نیست که برای همه کاربردها مناسب باشد. فاکتورهای خاصی از جمله برنامه کاربردی، ابزارها، فرآورده، محیط و بودجه تعیینکننده چگونگی استفاده کردن از ویژن سه بعدی در این فرآیند هستند. هنگامی که حرف از تنظیم تصویربرداری سه بعدی زمان واقعی در یک سیستم رباتیک باشد، هیچ استانداردی وجود ندارد. با این حال، چند تکنیک استاندارد وجود دارد که کارشناسان سازنده بینایی 3بعدی به کار میبرند که هر یک برای انجام کارهای خاصی طراحی شدهاست. این تکنیکها بینایی استریو، زمان پرواز (TOF)، سهگوشسازی لیزری و نور ساختاریافته هستند.
لیزر مثلثی (Laser Triangulation)
چیزها را از میان یک پرتوی نور میگذرانند که یک اسکنر لیزری روی آن نور پخش میکند. یک دوربین هوشمند در یک زاویه خاص قرار داده شده و هنگامی که آیتم از آن عبور میکند، پرتو را منحرف کرده و نیمرخی از چیز میسازد، تصویری از خط لیزری ثبت میکند.
نور ساختاریافته (Structured light)
یک پروژکتور، دسته باریکی از نور را برای ساخت الگویی روی یک جسم، ایجاد میکند. دوربینها از زاویههای گوناگون خطهای منحنی از نور را برای توسعه یک تصویر سه بعدی از آن جسم، را میبینند.
زمان پرواز (ToF)
یک دوربین از یک اسکنر لیزری قدرتمند برای پخش نور بازتابیافته از جسم مورد نظر به سنسور تصویر، استفاده میکند. فاصله از این دوربین تا آن جسم مورد نظر، بر اساس تاخیر زمانی بین نور پخششده و دریافتی محاسبه میشود.
بینایی استریو (Stereo vision)
سیستم رباتیک برای ثبت یک بینایی دو بُعدی از یک شی که از دو زاویه گوناگون گرفته شدهاست، دو دوربین بکار میبرد. سپس نرمافزار، موقعیت ایجاد شده دو دوربین را بکار برده و نقاط مربوط به هم را در دو تصویر مسطح مقایسه میکند تا معیارها را شناسایی کرده و یک تصویر بسازد.
بینایی سه بُعدی چه کاربردهایی در رباتیک دارد؟
برای شناسایی جسم ها، شناسایی قطعات و نیاز دریافت عناصر در زاویه نور، به رباتهای صنعتی مدرن نیاز است. در حالی که رباتهای قدیمی برای ثابت قرار دادن قطعات عالی بودند، رباتیک مدرن میتواند برای شناسایی محل قطعه، نسخهها را با هم تطبیق دهد. به جای این که خط تولید به خاطر عملیات بعدی متوقف شود، سیستم به سرعت تغییر را شناسایی کرده و با آن تطبیق پیدا میکند. در نتیجه، آرایهای از کاربردهای صنعتی در سرتاسر صنایع، در بینایی سه بعدی رباتیک سرمایهگذاری میکنند؛ که لجستیک، علوم زیستی، تولید و صنایع خودرو را در بر میگیرند. با خودکار شدن بسیاری از بخشها، استفاده از فناوری بینایی در قلمروهای تازهای گسترش مییابد. برنامههای کاربردی پالتایزینگ، اجزای بینایی سه بعدی را برای اسکن پالتهای پرشده با انواع گوناگون جعبههای ترابری برای دستهدسته کردن آنها بکار میبرند. آنها از اسکنرها برای ارسال تصویر به نرمافزار بهره میبرند تا به ربات اجازه دهند انواع جعبه را بر اساس الگوهای بافت شناسایی کرده و آنها را به مکانهای طراحیشده بفرستند. یک کارخانه فرآوری غذا، تکنولوژی بینایی چندطیفی و نورپردازی ویژه را برای بررسی محصول و شناسایی فاسدشدگی، بکار میبرد. کاربردهایی که از قدیم تکنولوژی بینایی را بکار میبردند، در حال حاضر به تجهیزات نوآورانهتر به روز میشوند. یک کمپانی هوافضا، برای بازرسی ایرادهای تیغههای توربین، ابزارهای بازرسی قدیمی خود را با اسکنهای سه بعدی جایگزین میکند که این کار زمان بررسی را از 18 ساعت به 45 دقیقه کاهش میدهد. تکنولوژی بینایی به گسترش خود ادامه میدهد، با روندهای آینده پیشبینیشده در کاربردهای لجستیک، بینایی دستگاه چند طیفی، سازگارسازی با استفاده از یادگیری ماشینی با بینایی سه بعدی و لنزهای مایع که امکان ایجاد تصاویر دقیقتر از فواصل دورتر را فراهم میسازند.
زیرمجموعههای سیستمی و اجزای بسیار مهم برای برنامههای کاربردی بینایی
بیشتر سیستمهای اتوماسیون هماهنگ بیش از یک سیستم کنترل اتوماتیک دارند و اجزای ترکیب شده، یک گروه سلول کاری کارآمد میسازند. هنگامی که بحث آمیختگی گزینههای بینایی سه بعدی پیشرفته مانند ردیابی چیزها، تصویربرداری از محصول و گریپر برداشت در یک خط پردازش میشود، سیستم باید دادههای تصویری سه بعدی بسازد. کاربرد بینایی سه بعدی در سیستمهای رباتیک نیازمند آمیختگی اجزای گوناگون است تا عرضه نیروی مناسب، پردازش زمان واقعی و امنیت را آسان سازد. یک عنصر مهم دیگر در اتوماسیون موفق، توانایی برقراری ارتباط است. در عصر دیجیتال، داشتن درگاههای اتصال برای اتصال دیجیتالی یک سیستم به دیگر قطعات تجهیزات برای به اشتراک گذاشتن دادهها، اقدام خوبی است. پیدایش تکنولوژیهای رباتی، اتصال وای فای برای همین اهداف را نیز آسانتر کردهاست. در استیج طراحی، اجرای یک بررسی ارزیابی ریسک تنها راه برای شناسایی و حذف مشکلات از سیستمی است که ممکن است در خطر بدکار کردن باشد. یک ربات که بینایی سه بعدی فعال داشته باشد میتواند با امنیت کامل یک ابزار را متوقف کند تا از ایجاد آسیب و زیان به تجهیزات جلوگیری کند. اگر خریداران در سیستم های رباتیک بینایی 3بعدی سرمایهگذاری کنند، نتیجه یک سیستم اتوماتیک انعطافپذیر و با کاربرد آسان خواهد بود.
تولید مدرن تقاضای کاهش هدررفت بیشتر، همراه با خطوط تولید کوچکتر دارد که تولیدات بیشتری ارائه دهند. نفوذ بینایی رباتیک، به توسعه خود در قلمروهای گوناگون تولید و یافتن روشهای تازه برای بهبود فرآیندهای اتوماتیک، ادامه خواهد داد. انتظار میرود در آینده، عناصر بینایی سه بعدی بیشتری در سیستمهای اتوماتیک رایج شوند.