

ربات :
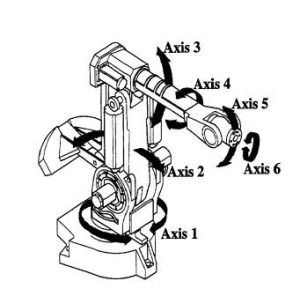
یک ربات یک بازوی مکانیکی می باشد که بازوها به وسیله سرو موتور حرکت می کنند . آن نقاطی که محورها به هم وصل می شوند را Joint یا محور ( Axis ) می گویند . J1 ، J2 و J3 محورهای اصلی ربات (basic axis) و J4 ، J5 ، J6 محورهای مچ مانند ( Wrist ) می باشند محور ششم را برای حرکت دادن ابزاری که به آن متصل شده استفاده می کنند .

کنترلر :

کنترلر ربات شامل منبع تغذیه ، برد کنترل حرکت ( motion controller ) ، برد حافظه ، برد ورودی خروجی ( input,output ) و برد ارتباطی کاربر ( user interface ) می باشد .
کاربر برای ارتباط با واحد کنترلر باید از Teach Pendant استفاده کند .
Teach Pendant:
Teach Pendant با کابل مربوطه به برد PC وصل می شود . کارهای زیر را می توان با Teach Pendant انجام داد :

– سرعت حرکت ربات (Feed )
– ایجاد و تغییر برنامه
– تست عملکرد برنامه
Payload چیست ؟

– اين مشخصه ظرفيت قابل حمل ربات را تعيين مي كند. بار قابل حمل براساس وزن و بار حاصل از اينرسي محاسبه مي شود. بار قابل حمل يكي از مهمترين پارامترها در زمان انتخاب ربات مي باشد.
– يك ربات كه تحت باري بيشتر از بار قابل حمل تعيين شده به كار گرفته شود، گاهي اوقات در ابتدا مي تواند كار كند، اما قابليت اطمينان آن به شدت افت مي كند. همچنين كاهش بار اعمال شده به ربات مي تواند قابليت اطمينان آنرا افزايش دهد چرا كه تنش اعمال شده به قطعاتي مثل چرخدنده ها و ياتاقانها كاهش مي يابد و دماي كاري موتورها و مدار كنترلر را كاهش مي دهد، در نتيجه عمر قطعات افزايش مي يابد.
محدوده كاری (Work Envelope )
محدوده كاری فضايی است كه انتهای مچ ربات بدون عملگر نهايی به آن می رسد.
محدوده كاری بايد باندازه ای بزرگ باشد كه به ربات اجازه رسيدن به تمام نقاط مورد نيازش برای كاربرد مورد نظر را بدهد. اگر فضای در دسترس كوچكتر از محدوده كاری ربات باشد، ربات را با سوييچهای سخت افزاری و نرم افزاری محدود می كنند و اگر فضای كاری مورد نياز بزرگتر از محدوده كاری ربات باشد، از دو ربات یا اضافه کردن محورهای اضافی استفاده می شود. شکل زیر محدوده کاری یک نمونه ربات شش محور است همانطور که ملاحظه می فرمایید ربات در محدوده ای که مشخص شده است می تواند حرکت کند .

قابلیت اطمینان ( Reliability )

يك پارامتر مشخص كننده قابليت اطمينان ربات ، زمان متوسط بين هر بار خراب شدن (Mean Time Between Failure (MTBF)) ربات است. بدست آوردن اين مشخصه با آزمايشهاي بلند مدت توسط سازنده حاصل می شود. اين مقدار می تواند 48 ماه باشد يعني كنترلر ربات بطور متوسط هر چهار سال يك بار خراب می شود. به عنوان مثال در ربات فانوک قابلیت اطمینان 105 هزار ساعت می باشد . ( FANUC reliability is 105.000 hours)
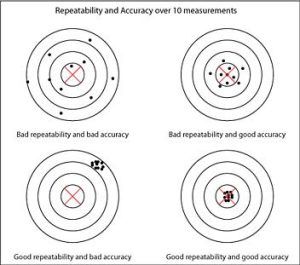
قابلیت تکرارپذیری ( Repeatability )
ميزان دقت بازگشت يك ربات به يك نقطه قبلی را قابليت تكرارپذيری ربات مي گويند.
قابليت تكرارپذيری خوب: بازگشت ربات در هر زمان به همان نقطه قبل
اين پارامتر در كاربردهايی كه دارای تلرانس بسته می باشند بسيار با اهميت است. بعنوان مثال اگر يك ربات بايد يك محور را داخل يك سوراخ كه فقط 0.05 ميليمتر از محور بزرگتر است قرار دهد، قابليت تكرارپذيری ربات بايد بالاتر و بهتر از مقدار مذكور باشد. با اين تعريف، يك ربات مي تواند داراي قابليت تكرارپذيري بسيار خوبی باشد اما از دقت كمی برخوردار باشد.
قابليت تكرارپذيری سازنده ربات ها : معمولاً در محدوده 0.01 ميليمتر تا 2 ميليمتر
منابع خطای تكرارپذيری عبارتند از:
-لقی در سيستم محركه ربات،
-اصطكاك
-انبساط حرارتی
-ابعاد ربات
-سيستم سروو موتور
ربات صنعتی بار قابل حمل ربات کنترلر ربات