
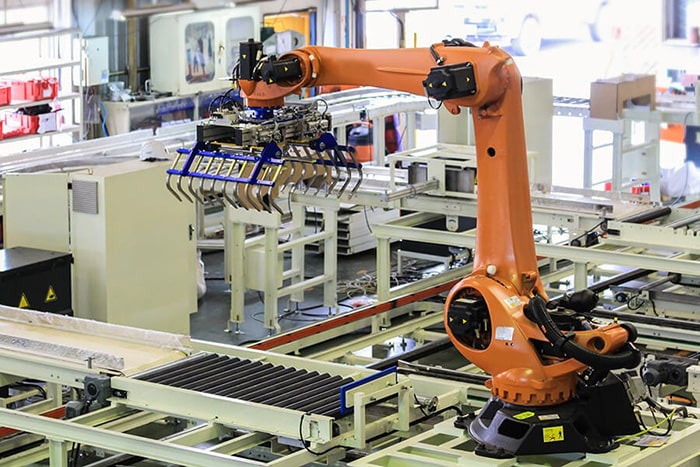
ربات های صنعتی بازوهای رباتیکی هستند که می توانند در چندین جهت حرکت کنند و می توانند برای انجام انواع مختلفی از وظایف در محیط های مختلف برنامه ریزی شوند. برای مثال این ربات های صنعتی می توانند درموارد زیر مورد استفاده قرار گیرند:
- در محیطهای مختلف مانند محفظههای فشار بالا و خلاء.
- در محیط های کاری کاملا تمیز و بهداشتی و یا در مناطق بسیار کثیف.
- در مناطق خطرناکی که خطر انفجار، عفونت، تشعشع یا سایر خطرات شدید وجود دارد و برای انسان خطرناک است.
بازوهای رباتیک را می توان به گیریپرهای تخصصی و متنوعی برای کار با اجسام ظریف و شکننده مجهز کرد، در حالی که سایر بازوهای رباتیک می توانند گیریپرهایی داشته باشند که بارهایی با وزن چندین تن را بگیرند و بلند کنند.
بازوهای رباتیک را می توان به هر نوع ابزاری مجهز کرد. این ابزارها برای انجام کارهایی با دقت بالا، شتاب، سرعت و تکراری که توسط انسان قابل مقایسه و انجام دادن نیست استفاده می شوند.
این بازوهای رباتیک میتوانند حسگرها و سیستمهای بینایی زیادی داشته باشند که قادر به مشاهده تصاویر برای کمک به کنترل رایانهای خود هستند. این حسگر و بازخورد بینایی را میتوان با هوش مصنوعی برای تصمیمگیری درباره رفتار بازوی روباتیک استفاده کرد.
ربات های صنعتی و اتوماسیون بخش مهمی از تولید اکثر محصولات تولید شده در دنیای امروز هستند.
اجزای اصلی ربات های صنعتی
چهار بخش اصلی یک ربات صنعتی عبارتند از: بازوهای مکانیکی، کنترل کننده، دستگاه رابط انسانی و منبع تغذیه.
یک بازو میتواند در جهات مختلف حرکت کند. در یک ربات صنعتی، نیرو می تواند از موتورهای الکتریکی، فشار هوا در سیلندرهای پنوماتیک یا فشار سیال در سیلندرهای هیدرولیک ناشی شود که این نیرو بازوی ربات را به حرکت در میاورد.
بازو دارای یک کنترلر است که “مغز” سیستم است. کنترلر کد برنامه نویسی را نگه می دارد و سیگنال ها را از سیستم دریافت می کند (ورودی)، سیگنال ها را پردازش می کند و سپس سیگنال هایی را برای کنترل ربات به سیستم (خروجی) می فرستد.
یک نوع ورودی ممکن است از دستگاه واسط انسانی Human Interface Device باشد. HID استانداردی است برای دستگاههای رایانهای که توسط انسان اداره میشوند. استاندارد اجازه میدهد تا از این دستگاهها بدون هیچ گونه نرم افزار یا درایور اضافی به راحتی استفاده شوند.از این دستگاه ها می توان برای برنامه ریزی بازو و کنترل حرکت آن استفاده کرد.
آخرین جزء منبع تغذیه است که در آن یک ربات صنعتی انرژی خود را برای کنترل کننده و محرک خود دریافت می کند. این معمولاً به شکل انرژی الکتریکی است.
اتوماسیون و ربات های صنعتی در تولید
از زمان توسعه چرخهای آبی در بیش از 6000 سال پیش، انسانها از اتوماسیون ابزارها برای کمک به زندگی خود استفاده کردهاند. همانطور که کارگران با استفاده از اینترنت، رباتیک، واقعیت مجازی (VR) و هوش مصنوعی (AI) در محیط های کاری جدید حرکت می کنند، لازم است که یک نیروی کار اتوماسیون و کابرد رباتیک در صنعت امروزی را درک کند.

اتوماسیون
هر زمان که یک ابزار به جای یک انسان کاری را انجام دهد، می توان آن را نوعی اتوماسیون در نظر گرفت. این کار میتواند گاهی ساده و گاهی کاملا پیچیده باشد.
انواع مختلف اتوماسیون عبارتند از: 1- مکانیزه 2- ثابت شده
مکانیزاسیون: اتوماسیون ابزارها و انقلاب صنعتی در طول سال ها توسعه یافته و تغییر کرده است. اولین نوع اتوماسیون به نام مکانیزه شناخته می شود. این نوع اتوماسیون زمانی اتفاق می افتد که ماشینی به تولید محصول کمک کند.
نمونه فعلی از این نوع اتوماسیون را می توان در یک کارگاه ماشین آلات یافت. هنگامی که یک پیچ سربی یک گیره را روی یک ماشین فرز حرکت می دهد، می توان یک مثال ساده نشان داد. پیچ در حال مکانیزه کردن یا همان خودکار کردن فرآیند است.
اتوماسیون ثابت یا سخت: مرحله بعدی اتوماسیون، اتوماسیون سخت یا ثابت نامیده می شود.
این مورد زمانی اتفاق می افتد که مجموعه ای از مکانیسم ها در یک نظم خاص برای ایجاد یک محصول مرتب شوند. هنگامی که سیستم راه اندازی شد، در یک توالی ثابت باقی می ماند. یک نمونه مدرن از این سیستم می تواند یک کارخانه فرآوری هیزم باشد. یک بازوی هیدرولیک یک کنده را در سیستم قرار می دهد، اره، چوب را به طول هیزم برش می دهد، سیستم چوب را حرکت می دهد تا از کاترهای هیدرولیکی چوب عبور کند، سپس یک نوار نقاله هیزم آماده شده را بلند می کند و آن را در کامیون می ریزد.
اتوماسیون قابل برنامه ریزی: با پیشرفته تر شدن نوع اتوماسیون، سیستم هایی با بازخورد بیشتری ایجاد شدند. همچنین انعطاف پذیری بیشتری در انواع محصولات تولید شده توسط این سیستم ها وجود دارد. این مدل از اتوماسیون، اتوماسیون قابل برنامه ریزی نامیده می شود. فرآیند تولید را می توان توسط کامپیوتر برنامه ریزی کرد، با این حال، توالی تولید اغلب تغییر نمی کند. به همین دلیل، ممکن است از کنترل کننده های کم هزینه در سیستم استفاده شود.
نمونه ای از این نوع اتوماسیون را می توان در یک کارخانه ریخته گری قطعات فلزی ، یافت. بارگیری فلز خام در کوره برای ذوب شدن می تواند خودکار باشد. فلز مذابی که در قالب ها ریخته می شود را می توان دمایش را کنترل کرد و خنک سازی و حذف قطعات از قالب ها نیز با کامپیوتر قابل کنترل است. با این حال، بسته به محصول، ممکن است برای اعمال تغییراتی در محصول، تغییرات عمده ای در سیستم مورد نیاز باشد.
سیستمهای تولیدی انعطافپذیر: پیشرفتهترین سطح اتوماسیون به کمک رایانه به عنوان یک سیستم تولید انعطافپذیر شناخته میشود. کد کامپیوتری سطح بالا اکثر جنبه های این سیستم ها را کنترل می کند. ابزار لازم برای تولید محصول توسط سیستم کامپیوتری کنترل می شود. محصول در طول تولید به طور خودکار از یک فرآیند به فرآیند دیگر منتقل می شود. بازرسی و مرتبسازی نیز میتواند به صورت خودکار در سیستم اتفاق بیفتد.
نمونه ای از این را می توان در یک کارخانه تولید قطعات خودرو یافت. تولید این قطعات می تواند از ابتدا تا انتها خودکار باشد. با این حال، به دلیل تغییر مکرر مدل های خودرو، سیستم برای ایجاد تغییرات نیاز به انعطاف پذیری دارد.